
 (6 оценок, среднее: 4,67 из 5)
(6 оценок, среднее: 4,67 из 5)
Учебная работа № 1451. Идентификация автономного электрогидравлического следящего привода
Малышев В.Н., Попов Д.Н., Сосновский Н.Г.
Автономные электрогидравлические следящие приводы (ЭГСП) с дроссельным регулированием широко применяют в различных отраслях техники. Для выбора оптимального проектного варианта ЭГСП необходимо иметь комплекс проблемноориентированных математических моделей. В такой комплекс входят математические модели, описывающие динамику ЭГСП. С помощью этих моделей можно находить показатели качества процессов управления, которые относятся к числу важных критериев при оценке проектных вариантов ЭГСП. В статье на примере одного из распространенных типов автономного гидропривода изложена методика определения вида и параметров математической модели, предназначенной для использования в дальнейшем при решении задачи многокритериальной оптимизации системы с автономным ЭГСП [1].
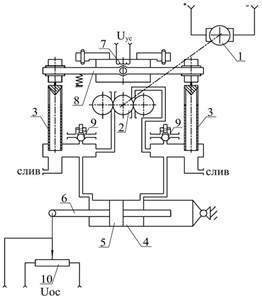
Рис.1
Конструктивная схема рассматриваемого ЭГСП дана на рис.1.[2]. Электродвигатель 1 приводит во вращение трехшестеренный насос 2, который создает потоки рабочей жидкости, направляемой к золотниковым плунжерам 3. В отсутствие подводимого от электронного усилителя сигнала ![]() жидкость через окна, открытые золотниковыми плунжерами, поступает на слив. Вследствие равенства площадей окон разность давлений в полостях гидроцилиндра 4 равна нулю и поршень 5 вместе со штоком 6 неподвижны. При наличии сигнала в виде напряжения на концах обмотки 7 электромеханического преобразователя (ЭМП) происходит поворот качалки 8 по или против хода часовой стрелки в зависимости от полярности сигнала. Поворот качалки вызывает перемещение золотниковых плунжеров, увеличивающих открытие одного окна и уменьшающих открытие другого. Соответственно давление в одной полости гидроцилиндра уменьшается, а в другой – увеличивается. Под действием силы, созданной разностью давлений в гидроцилиндре, поршень 5 перемещается до тех пор, пока сигнал
жидкость через окна, открытые золотниковыми плунжерами, поступает на слив. Вследствие равенства площадей окон разность давлений в полостях гидроцилиндра 4 равна нулю и поршень 5 вместе со штоком 6 неподвижны. При наличии сигнала в виде напряжения на концах обмотки 7 электромеханического преобразователя (ЭМП) происходит поворот качалки 8 по или против хода часовой стрелки в зависимости от полярности сигнала. Поворот качалки вызывает перемещение золотниковых плунжеров, увеличивающих открытие одного окна и уменьшающих открытие другого. Соответственно давление в одной полости гидроцилиндра уменьшается, а в другой – увеличивается. Под действием силы, созданной разностью давлений в гидроцилиндре, поршень 5 перемещается до тех пор, пока сигнал ![]() обратной связи от датчика 10 не компенсирует входной сигнал
обратной связи от датчика 10 не компенсирует входной сигнал ![]() . Установленные на напорных магистралях насоса предохранительные клапаны 9 ограничивают чрезмерное повышение давления в гидроцилиндре. Элементы 3,8 образуют однокаскадный гидроусилитель (ГУ).
. Установленные на напорных магистралях насоса предохранительные клапаны 9 ограничивают чрезмерное повышение давления в гидроцилиндре. Элементы 3,8 образуют однокаскадный гидроусилитель (ГУ).
Воспользовавшись описанной в [3] методикой, математическую модель ЭГСП можно представить системой уравнений
С начальными условиями (t=0)
![]()
Переменные состояния системы представлены в виде:
![]() ;
; ![]() ;
; ![]() ,
,
где ![]() – ток управления,
– ток управления, ![]() – перемещение золотниковых плунжеров гидроусилителя,
– перемещение золотниковых плунжеров гидроусилителя, ![]() – перемещение штока гидроцилиндра.
– перемещение штока гидроцилиндра.
Остальные величины определяются с помощью приведенных ниже формул:
Значение электрического сигнала ошибки
![]() ,
,
где ![]() – входной сигнал управления ЭГСП.
– входной сигнал управления ЭГСП.
Уравнение сигнала обратной связи
![]() ,
,
где ![]() – коэффициент передачи датчика позиционной обратной связи.
– коэффициент передачи датчика позиционной обратной связи.
Напряжение на выходе электронного усилителя (ЭУ)
![]() ,
,
где ![]() – коэффициент усиления ЭУ.
– коэффициент усиления ЭУ.
Напряжение на входе в обмотки управления ЭМП
 ,
,
где ![]() сопротивление обмоток ЭМП,
сопротивление обмоток ЭМП, ![]() сопротивление выходного каскада электронного усилителя,
сопротивление выходного каскада электронного усилителя, ![]() – индуктивность электромагнитной части ЭМП.
– индуктивность электромагнитной части ЭМП.
Постоянная времени и коэффициент передачи обмоток управления ЭМП:
 ,
,
Уравнение движения элементов узла управления (УУ):
![]() ,
,
где ![]() – постоянная времени узла управления,
– постоянная времени узла управления, ![]() коэффициент относительного демпфирования узла управления.
коэффициент относительного демпфирования узла управления.
Угол поворота качалки ЭМП:
![]() ,
,
где ![]() коэффициент передачи ЭМП.
коэффициент передачи ЭМП.
Перемещение золотниковых плунжеров
![]()
где ![]() коэффициент передачи, связывающий перемещение золотниковых плунжеров с углом поворота качалки ЭМП.
коэффициент передачи, связывающий перемещение золотниковых плунжеров с углом поворота качалки ЭМП.
Уравнение линеаризованной расходноперепадной характеристики
![]() ,
,
где ![]() – разность давлений в полостях гидроцилиндра,
– разность давлений в полостях гидроцилиндра, ![]() – расход рабочей жидкости, обеспечивающий движение поршня гидроцилиндра;
– расход рабочей жидкости, обеспечивающий движение поршня гидроцилиндра; ![]() и
и ![]() коэффициенты преобразования в расход жидкости перемещения золотниковых плунжеров и разности давлений
коэффициенты преобразования в расход жидкости перемещения золотниковых плунжеров и разности давлений ![]() в полостях гидроцилиндра соответственно.
в полостях гидроцилиндра соответственно.
Постоянная времени гидропривода:
 ,
,
где, ![]() – рабочая площадь поршня.
– рабочая площадь поршня.
В приведенную выше систему четырех дифференциальных уравнений не входит уравнение, описывающее нагрузку на выходное звено ЭГСП. Эта нагрузка может быть различной в зависимости от условий, в которых используется ЭГСП. В рассматриваемой далее экспериментальной установке нагрузка на выходное звено ЭГСП проявляется при частотах, значительно превышающих частоты ненагруженного привода, что дает основание не учитывать такую нагрузку при идентификации привода. Принятое упрощение исходной математической модели уменьшает неопределенность исследуемой системы и не влияет на достоверность определения параметров, зависящих от конструкции ЭГСП.
Идентификация параметров ЭГСП была проведена на экспериментальной установке, имеющейся в лаборатории динамики и регулирования кафедры гидромеханики, гидромашин и гидропневмоавтоматики МГТУ им. Н.Э.Баумана [4]. Схема установки представлена на рис.2.
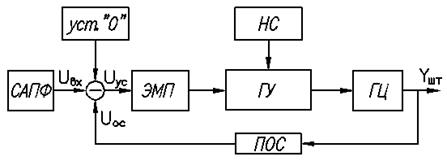
Рис.2
На схеме показаны: электромеханический преобразователь (ЭМП), однокаскадный гидроусилитель, исполнительный гидроцилиндр (ГЦ) и датчик позиционной обратной связи (ПОС). Питание гидроусилителя жидкостью под давлением обеспечивается трехшестеренным насосом (НС), смонтированным в одном корпусе с другими элементами привода. Входные сигналы поступают от электронного низкочастотного генератора периодических колебаний, входящего в состав прибора “Система анализа передаточных функций” (САПФ). С помощью регулятора установки нуля (уст. “0“) можно изменять начальное положение выходного звена ГЦ.
При работе установки электрический сигнал с выхода САПФ в виде гармонически изменяющегося напряжения ![]() поступают на вход ЭМП, управляющего положением золотниковых плунжеров 3 (рис.1) в ГУ. Вследствие периодического смещения плунжеров от нейтрального положения происходит периодическое изменение разности давлений в полостях ГЦ и поршень 5 ГЦ вместе с его выходным звеном совершают колебания, близкие к гармоническим. Частота и амплитуда колебаний выходного звена привода при гармоническом входном сигнале поддерживается благодаря ПОС.
поступают на вход ЭМП, управляющего положением золотниковых плунжеров 3 (рис.1) в ГУ. Вследствие периодического смещения плунжеров от нейтрального положения происходит периодическое изменение разности давлений в полостях ГЦ и поршень 5 ГЦ вместе с его выходным звеном совершают колебания, близкие к гармоническим. Частота и амплитуда колебаний выходного звена привода при гармоническом входном сигнале поддерживается благодаря ПОС.
Описанный режим работы установки использовался при определении экспериментальных характеристик ЭГСП. При этом выходной величиной являлось перемещение штока ГЦ. Входной сигнал ![]() для ЭГСП формировал низкочастотный генератор САПФ. Регистрируемый сигнал от датчика положения штока ГЦ поступал в блок регистрации САПФ. Данный блок выделяет первую гармонику сигнала и вычисляет координаты логарифмических частотных характеристик исследуемой системы.
для ЭГСП формировал низкочастотный генератор САПФ. Регистрируемый сигнал от датчика положения штока ГЦ поступал в блок регистрации САПФ. Данный блок выделяет первую гармонику сигнала и вычисляет координаты логарифмических частотных характеристик исследуемой системы.
Эксперименты проводились при различных значениях амплитуды входного сигнала. Для каждого значения этой амплитуды измерялись значения амплитуды и фазы при разных частотах входного сигнала.
Результаты экспериментов были оформлены в виде логарифмических амплитудных и фазовых частотных характеристик.
Точность измерений с помощью САПФ проверялась путем сравнения показаний прибора с частотными характеристиками, полученными при моделировании апериодического звена первого порядка (рис.3). Моделирование осуществлялось на аналоговой вычислительной машине (АВМ), что позволило при необходимости учесть влияние электрических линий, передающих сигналы от датчиков ЭГСП к проверяемому прибору.
Uвх = 0,91 В
Рис.3
Постоянная времени и коэффициент усиления апериодического звена имели соответственно следующие значения: ![]() [c],
[c], ![]() .
.
Тарировка показала, что САПФ обеспечивает достоверные значения параметров частотных характеристик.
Ряд экспериментов, проведенных на установке, позволил получить логарифмические амплитудные (ЛАХ) и фазовые (ЛФХ) частотные характеристики реального ЭГСП. Эти характеристики вместе с рассчитанными по математической модели ЭГСП показаны на рис. 46. Значения коэффициентов математической модели, полученные после идентификации ЭГСП, приведены ниже в таблице:
|
|
|
|
|