
 (6 оценок, среднее: 4,67 из 5)
(6 оценок, среднее: 4,67 из 5)
Учебная работа № 1767. Математические модели электромеханических систем в пространстве состояний
2. Математические модели электромеханических систем в пространстве состояний
Способы получения уравнений состояния реальных физических объектов ничем не отличаются от способов описания этих объектов с помощью дифференциальных уравнений. Уравнения состояния записываются на основе физических законов, положенных в основу работы объекта.
Рассмотрим электромеханическую систему, состоящую из двигателя постоянного тока с независимым возбуждением, работающего на инерционную нагрузку с вязким трением. Управляющим воздействием для двигателя считаем напряжение на якоре U(t), выходной координатой, угол поворота вала двигателя y(t)=j(t). Уравнение электрической цепи имеет вид
![]() ,
,
где ![]() противо ЭДС,
противо ЭДС, ![]() угловая скорость вала двигателя,
угловая скорость вала двигателя, ![]() единый электромагнитный коэффициент.
единый электромагнитный коэффициент.
Уравнение моментов будет иметь следующий вид
![]() ,
,
где ![]() , J момент инерции нагрузки, приведенный к валу двигателя, f коэффициент вязкого трения.
, J момент инерции нагрузки, приведенный к валу двигателя, f коэффициент вязкого трения.
Выберем следующие переменные состояния: х1 =i, x2 =w, x3 =j.
Получим
![]() ,
,
![]() .
.
Запишем эти уравнения относительно переменных ![]() ,
, ![]() ,
, ![]()
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
Запишем матричные уравнения
![]() ,
,
![]() ,
,
где
 ,
,  ,
, ![]() .
.
Рассмотрим структурную схему электромеханической системы с двигателем постоянного тока, работающего на инерционную нагрузку с вязким трением.
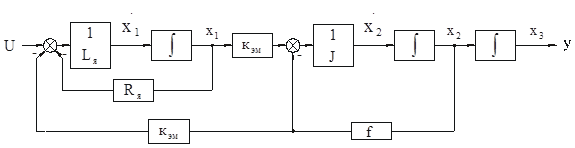
Рис. 2.1. Структурная схема электромеханической системы с двигателем постоянного тока
Запишем уравнение состояния для механической системы, представляющей собой груз массой m, подвешенный на пружине и соединенный с гидравлическим демпфером. К грузу приложена сила P(t), выходная переменная перемещения x(t), управляющие воздействия U(t)=P(t). Уравнение движения груза получаем из уравнения равновесия сил
![]() ,
,
где ![]() инерционная сила, f коэффициент вязкого трения,
инерционная сила, f коэффициент вязкого трения, ![]() сила сопротивления демпфера,
сила сопротивления демпфера, ![]() сила сопротивления пружины.
сила сопротивления пружины.
Выбираем в качестве переменных состояния x(t) и ![]() перемещение и скорость перемещения соответственно.
перемещение и скорость перемещения соответственно.
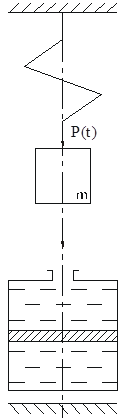
Рис. 2.2. Механическая система, включающая в своем составе пружину, массу и вязкий демпфер
Так как дифференциальное уравнение имеет второй порядок, то и количество переменных состояния будет равно двум. Исходное уравнение движения груза можно записать в виде двух уравнений
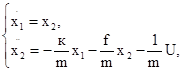
где U(t)=P(t) управляющее воздействие.
Добавим к этим уравнениям следующее уравнение выхода
![]() .
.
Эти уравнения представляют собой уравнения состояния приведенной механической системы. Запишем эти уравнения состояния в матричном виде
 ,
,
 .
.
Запишем это уравнение в другом виде
![]() ,
,
![]() ,
,
где  ,
,  ,
,  ,
, ![]() ,
, ![]() .
.
С данным уравнением состояния можно сопоставлять следующую структурную схему, где двойными линиями показаны векторные переменные.
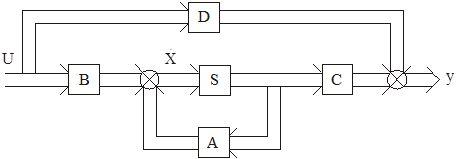
Рис. 2.3. Структурная схема
Пример: Рассмотрим электрическую цепь и получим уравнение состояния RLC цепи
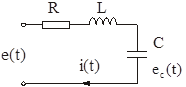
Рис. 2.4. RLC цепь
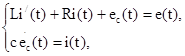
Динамическое поведение этой электрической системы полностью определяется при t³t0 , если известны начальные значения: i(t0 ), ec (t0 ) и входное напряжение e(t) при t³t0 , следовательно, эта система полностью определяется переменными состояния i(t) и ec (t). При указанных переменных состояния i(t) и ec (t) имеем следующие уравнения
где ![]() ,
, ![]() .
.
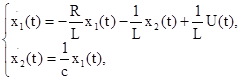
Введем следующие обозначения

В соответствии с этими обозначениями получаем
причем ![]() .
.
Следовательно, для электрической цепи запишем эту систему в векторноматричном виде
 ,
,
.
Запишем матричные уравнения
![]() ,
,
![]() ,
,
где  ,
,  ,
, ![]() ,
, ![]() .
.